HOME » キーワード検索 » 研究者名リスト () » 矢代 大祐 詳細
2012年更新
- カテゴリ
- 機械、情報・通信、エレクトロニクス
- キーワード
- 知能機械学 通信・ネットワーク工学 制御工学
一言アピール
ハプティクス(触覚情報を工学的に抽出・保存・加工・伝送・再現する学問)の研究をおこなっています。低侵襲性外科手術用ロボット、スキルトレーニングシステム、視触覚通信などへの応用が期待されています。
研究テーマ
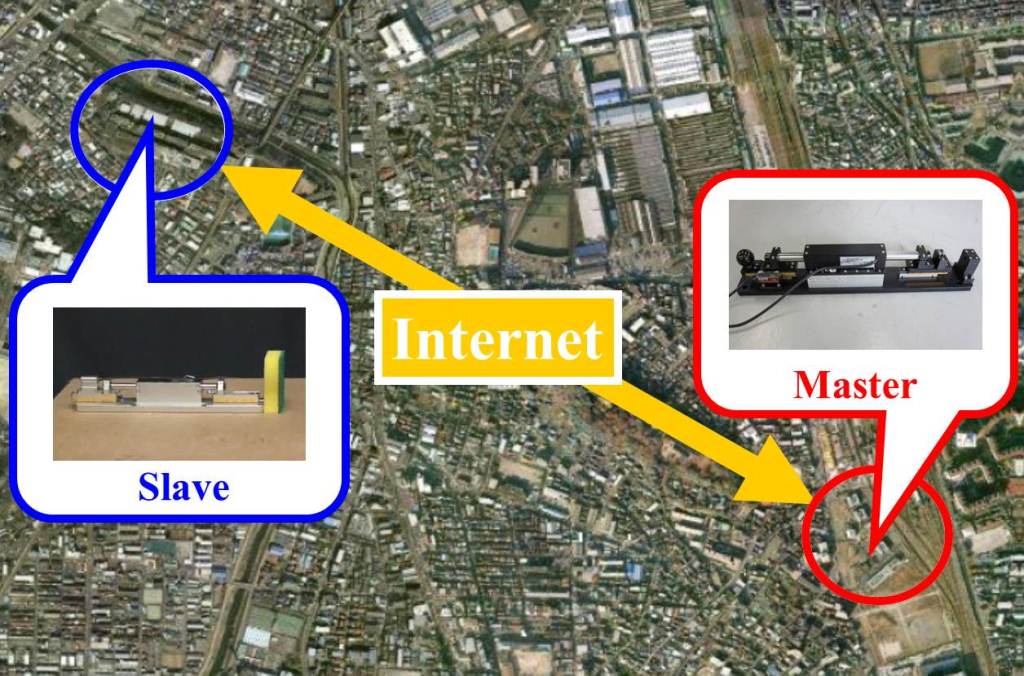
- ●視触覚同期通信のための通信プロトコル
- 遠隔地にある未知物体の硬さを鮮明かつリアルタイムに再現可能なヒューマンインターフェースを開発する。硬さを再現するためには、触覚データと視覚データを扱う必要がある。触覚データはサイズが小さいものの、送受信周期や通信遅延時間が極めて短い必要がある。一方で、視覚データはサイズが大きいものの、送受信周期や通信遅延時間に関する要求は厳しくない。通信制約下で触覚データと視覚データを同期通信するために、これら視触覚データの特性を考慮した通信プロトコルを検討する。
- ●ロボットを用いた人・環境の状態推定
- 未知物体の特性(弾性、粘性、慣性、位置、姿勢、形など)をロボットを用いて推定する。推定値は、医療診断・外科手術における臓器の状態推定やロボットによる物体把持などに活用できる。また、人の動作スキルの特性(熟練度、動作名称など)もロボットを用いて推定する。推定値は、スキルトレーニングやロボットによる作業の自動化などに活用できる。
- ●高度なモーションコントロールのための多自由度マニピュレータ
- バイラテラル遠隔操作をはじめとする高度なモーションコントロールを実現するためには、位置制御性能だけではなく、力制御性能にも優れた多自由度マニピュレータが必要である。そこで、小型・高出力・広動作周波数・広可動域・線形などの特性を併せ持つ、多自由度マニピュレータを開発する。
 視触覚通信のための通信プロトコル
視触覚通信のための通信プロトコル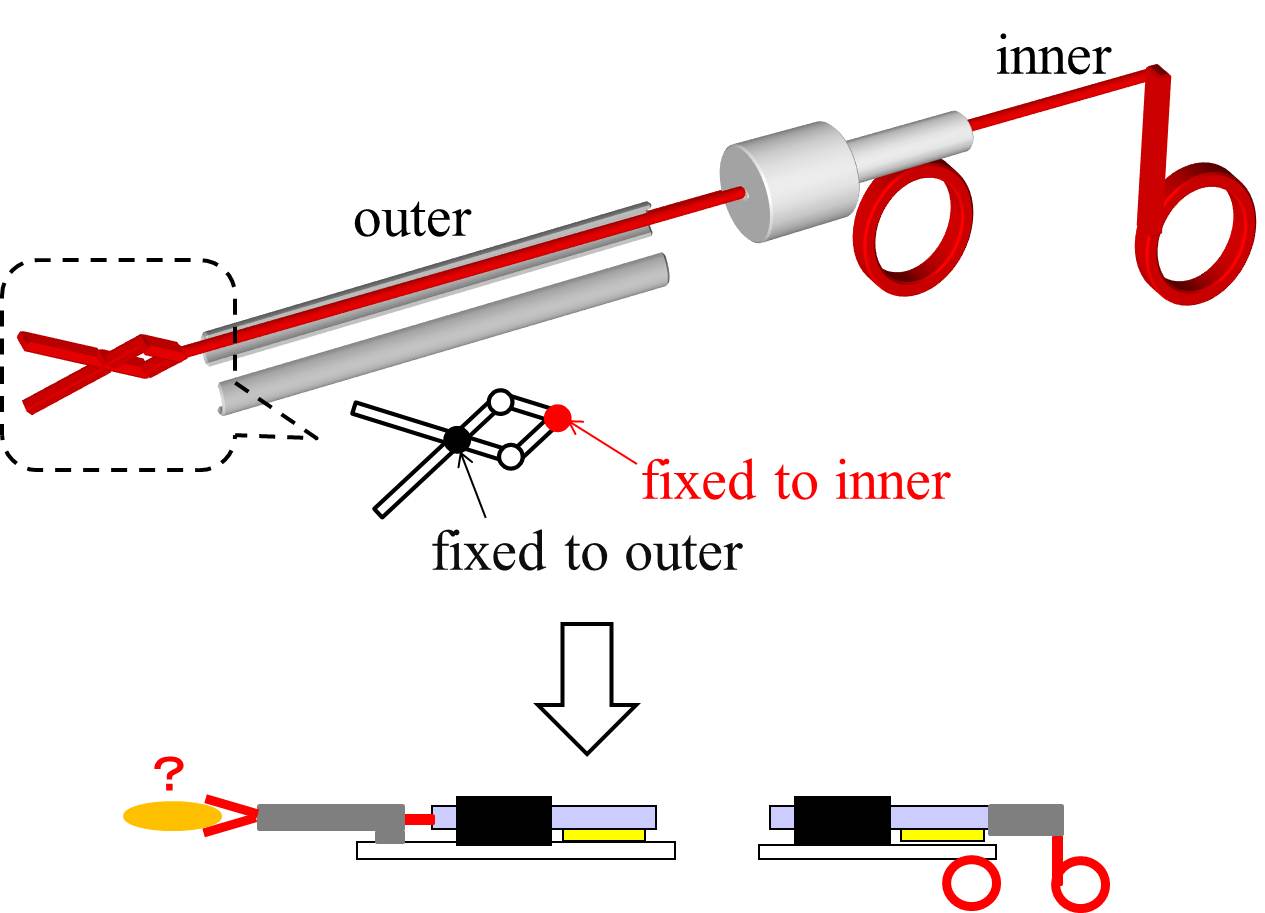 ロボットを用いた人・環境の状態推定
ロボットを用いた人・環境の状態推定
※画像をクリックすると拡大します。
応用分野
●情報通信サービス ●高精度製造技術
●医療・福祉機器 ●事故対策技術
保有技術
●外乱オブザーバを用いた制御系設計 ●視触覚通信技術
調査
●電気学会 産業応用部門 実世界ハプティクス協同研究委員会 委員(2012-)
●電気学会 電子・情報・システム部門 触覚デバイスの高度化協同研究委員会 幹事補(2012-)
●電気学会 編集専門第4部会 編集委員(2007-2009)
受賞
●電気学会優秀論文発表賞(2010) ●電気学会産業応用部門優秀論文発表賞(2008)
所属学会
●IEEE ●電気学会
●電子情報通信学会 ●日本コンピュータ外科学会