
- トップ
- 新しいアルゴリズムに基づいたクレーン制振技術:揺らさない搬送軌道が設計できます!
機械
機械・装置
新しいアルゴリズムに基づいたクレーン制振技術:揺らさない搬送軌道が設計できます!
想定される用途
天井クレーンや倒立振子をはじめとした単振り子式振動体の制振装置
想定される連携形態
クレーン制振装置の開発に関する共同研究、倒立振り子式移動装置に関する共同研究
|
|
所属・役職 |
工学研究科・准教授 |
|---|---|---|
研究者氏名 |
小竹 茂夫 | |
|
||
概要
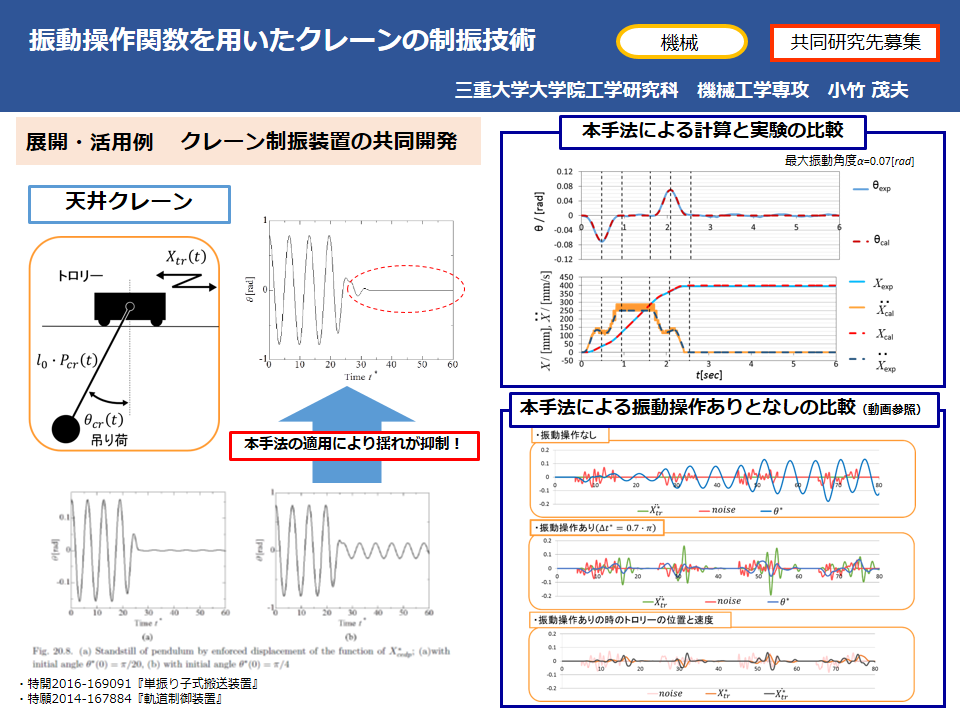
独自の新しい間欠的なフィードフォワード関数を開発し、単振り子式振動体の制振技術に応用できることを示しました。
本技術は、検出した被制御振動体の質量の位置と速度から決定される本関数を元に振動操作アクチュエータを制御して、任意時間毎に該被制御振動体の位置と速度が目標の値になるように該被制御振動体の軌道をサンプル値制御する振動制御装方法です。
天井クレーンや建設用クレーンの振動のダンパーの接続が困難な振動系の残留振動を任意時間毎に完全になくしたり、セグウェイ等の倒立振り子式移動装置の制御をすることができます。
アピールポイント
シミュレーションと研究室での実験では本技術の効果が確認できております(下記リンクの動画参照)。
実用化を目指した共同研究開発を希望いただける方はご一報ください。
補足資料(動画)
・本技術を適用しない場合のクレーンの様子(Youtubeに移動します。)
・本技術を適用したクレーンの制振実験(Youtubeに移動します。)
補足資料(マンガ)
補足資料(スライド)
特許情報
1)発明の名称:軌道制御装置、公開番号:特開2016-045595、出願人:三重大学 PDF
2)発明の名称:単振り子式搬送装置、公開番号:特開2016-169091、出願人:三重大学 PDF
論文情報
“Application of Sampled-Data Control by Using Vibration Manipulation Function to Suppress Residual Vibration of Travelling Crane”, Mechanical Engineering Journal, 2(3), 15-00033 (2015)